Artur Arsénio
Innovator | Manager | Engineer | Passionate for new technology business
Architecture
Projections of augmented reality content into the patient's arm and into the surrounding environment for providing real-time execution and final performance multimodal feedback. Work in collaboration with Joaquim Jorge, João Vieira and Mauricio Sousa.
 |
|---|
 |
SleeveAR
The world population is aging rapidly. There is an increasing need for health assistance personnel, such as nurses and physiotherapeutic experts, in developed countries. On the other hand, there is a need to improve health care assistance to the population, and especially to elderly people that promote active aging and prevent sedentary behaviors. This will mostly benefit specific user groups, such as elderly, patients recovering from physical injury, or athletes. New technologies are required for enabling treatment at home, reducing pressure for health care personnel at hospitals. In this context, the advances in augmented reality, robotic and assistive technologies have the potential to increase quality of life and change health care delivery models, reducing costs, and improving monitoring. The precise execution of physiotherapeutic exercises by patients in recovery, or by athletes in sports, is very important to allow a fast recovery or high performance, respectively. In addition, incorrect postures may often lead to injuries.
Sponsor: Carnegie Mellon University - Portugal program, FCT
August 2014 - July 2017
AHA - Augmented Human Assistance
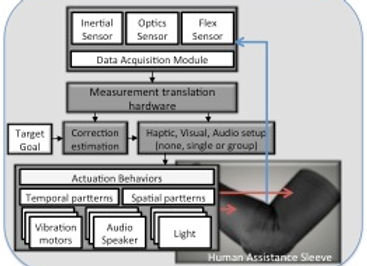
Haptic Sleeve
Mobile Robot
AR and Interactive Game
The AHA (Augmented Human Assistance) project aims at exploiting the usage of mobile robots in order to support physiotherapeutic activities for the recovery of patients, as well as providing elderly’s support at home.There are several scenarios in which robots and augmented reality are very useful for augmented human assistance:
-
Teaching, for robots to supporting human teachers by projecting augmented reality content on a wall or on objects.
-
Patient rehabilitation exercises support, by projecting augmented reality content during physiotherapeutic activities in which the patient receives in real-time visual feedback and corrective postures
-
Information providers, such as projection of AR content informing people that a new activity is about to start, or calling then with visual signs, or even moving along with people to places where action is going to take place (e.g. using projected directional arrows), or informing someone to stop performing an exercise
-
People protection, such as projecting augmented reality content (for instance a stop sign) if a person moves into a forbidden zone or door, or performs a forbidden rehabilitation exercise or movement
-
People entertainment: robots can play games with children or elderly peo-ple, according to content projected into the floor. In another scenario, a patient rehabilitation can involve game playing (serious games).
Furthermore, robots can perform several supporting activities at home, such as:
-
support safe medicine delivery and intake. A robot may carry the medicine, and at the appropriate time, take it to the patient.
-
In addition, the robot may also carry on board medical equipment, such as thermometer, arterial pressure measurement device, or electrocardiogram (ECG) equipment, making it available to patients at home.



The prototype
The robot nurse - 3D CAD concept design


System Setup
Real-time execution feedback
 |
|---|
 |



However, not always a professional therapeutic, or a coach, is available to guide the apprentice during the exercise to guarantee the correct posture and movement execution. Hence, we need to develop augmented reality solutions to enable interactive human assistance, using multimodal feedback and gamification approaches for human assistance, as well as augmented reality methodologies that project visual instructions on the user’s body and surrounding environment, together with audio cues.


Two users play with AR content projected by the robot
User plays against robot