Artur Arsénio
Innovator | Manager | Engineer | Passionate for new technology business
Sponsor: NATO

PO-ROBOT
A fundamental issue in mobile robots navigation is the robot’s accurate localization along the robot’s trajectory. Uncertainty should be monitored continuously to reason about the accuracy of the robot’s estimated location. Complex environments, such as industrial ones, are extremely cluttered and noisy.
Inaccuracies in sensors introduce additional problems. Multiple strategies may be applied depending on the status of the robot.
 |
|---|
 |
The industrial environment
The robotic mobile platform and laser
Robot Localization Architecture
Contributions:
-
The compounded natural landmark, which integrates three features exploiting the nature of the edge detector
-
A novel approach for the mobile robot localization - an active sensor fusion scheme applies a different localization algorithm depending on the robot’s status
-
Active range sensing allows high up-date rates for the system, through the detection of only one landmark (the optimal) at each iteration
-
Robustness and accuracy are achieved using a Visibility Cell Map and optimal filtering techniques

Architecture for real-time, active localization, and absolute localization for recalibration
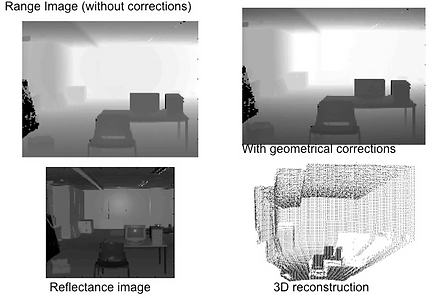
3D reconstruction from laser data
Laser Range Sensing


 |
|---|
 |
The Mobile Robot
The PO-ROBOT project from NATO Science for Stability Program - Multi-Purpose Portuguese Flexible Mobile Robot. Development of a new methodology for the localization of Mobile Robots using a Laser Range Finder mounted on an active Pan and Tilt unit, for implementation in an industrial prototype.